Two-wheel self-balancing robot
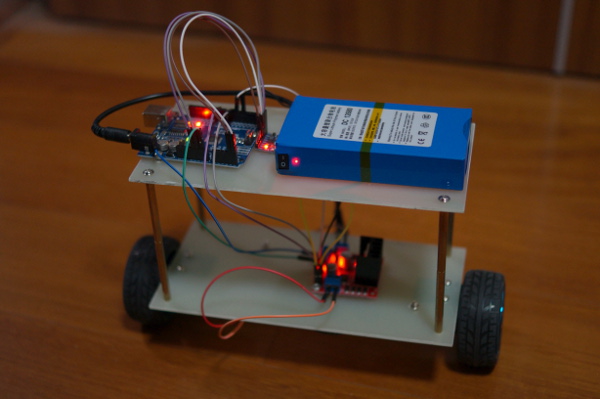
After my first fast made self balancing robot, I want to better understand it and especially to try different control methods. For me it is necessary to simulate the whole stuff on computer (robot + control law). The first step is therefore to model the robot with mathematical equations. Because of the complexity of the model I do make … Read more